
![PHPMaker12[PHP代码自动生成脚本] 12.0.7 官方最新版](http://pic.9upk.com/soft/softico/2016-3/201632310443410090.png)

![Smultron for mac[网页文本代码编辑器] 8.0.1 MAC官网版](http://pic.9upk.com/soft/UploadPic/2015-10/201510139242995741.jpg)
robotart是一款专业的离线编程仿真软件。编程人员都在使用的离线编程仿真软件robotart。经过多年的研发和行业应用,RobotArt掌握了许多离线编程核心技术,包括高性能3D平台,基于几何拓扑和历史特征的轨迹生成和规划,自适应机器人算法和后生成技术,以及支持深度自动定义的开放系统架构,事件模拟和拍子分析技术,在线数据通信和交互技术等;它的功能涵盖了机器人集成应用程序的整个生命周期,包括方案设计,设备选择,集成调试和产品修改。 RobotArt在打磨,抛光,喷涂,粘合,去毛刺,焊接,激光切割,CNC加工和雕刻领域拥有多年的积累,并逐渐形成了成熟的技术包和解决方案。在教育领域,RobotArt致力于培养新一代的高素质机器人应用设计和编程人才。大量在校学生以机器人虚拟仿真和离线编程为入口,开始了自己的机器人学习和职业生涯。同时,RobotArt还是教育部职业和职业国家竞赛的机器人相关竞赛。向翔提供了技术支持,选手们展示了他们在RobotArt软件中的才华。功能强大且实用,需要它的用户可以下载体验。
软件特色:
1.支多种格式的3D CAD模型,可以通过step,igs,stl,x_t,prt(UG)导入,
Prt(ProE),CATPart,sldpart和其他3D模型格式。
如图2所示,轨迹与CAD模型特征相关联,模型移动或变形,并且轨迹自动更改。
3.拥有多种技术包,例如切割,焊接,喷涂,去毛刺,CNC加工。
4.支持将整个工作站模拟动画发布到网页和手机上。
5,实现多种品牌工业机器人虚拟教学装置的操作,实现教学。
6.支持机器人的自由组装和设计,学习机器人原理和运动过程。
ArtRobotArt在离线编程行业中取得了巨大成就,这在很大程度上取决于其先进而强大的产品核心技术。
从高性能平台,在线数据通信和交互技术,到事件模拟和拍子分析技术,再到支持深度定制的开放系统架构,
RobotArt的核心技术成为整个产品水平和质量的基础。
使用说明:
ArtRobotArt机器人离线编程软件可以创造性地简化和系统化离线编程方法。使用该理论系统,机器人的离线编程过程就像构建块一样,简化并易于使用。使用RobotArt,从最基本的场景构建到最终实现复杂机器人的离线模拟效果,整个过程都是逐步的,并将逐步呈现给所有人。
RobotArt是一站式解决方案。整个操作和使用过程包括四个主要步骤:场景构建,轨迹设计,模拟和安装后。

2.2 ABB机器人书写(“部分”)
介绍这种小写案例,目的是让每个人在最短的时间内对整个RobotArt使用过程和使用方法有一个简单而清晰的理解和感觉,从而达到快速启动的效果。
整个机器人的编写过程如下:
(1)从工作站库下载名为“ ABB Robot Writing(“ Ke”)“的项目文件
下载位置:
A.单击RobotArt离线编程软件顶部的功能面板[Robot Programming] / [File] / [Workstation];

B.在展开的“选择工作站”界面中,单击“类别:界面”,然后找到“ ABB机器人编写(“ Ke”)“工作站;

C.单击[插入]按钮进行下载。

下载后的场景:
(2)校准:(由于空间有限,此处不再详细描述校准。有关详细信息,请参阅RobotArt网站上“ Learn Art”下第三本书“ RobotArt用户手册”中有关知识点的介绍。 。
通常在添加轨迹之前进行校准。这里需要两件事,因为RobotArt设计环境中的工具,零件等已预先进行了校准。
因此关于校准的知识点并不太多。以下只是关键步骤的简要介绍:
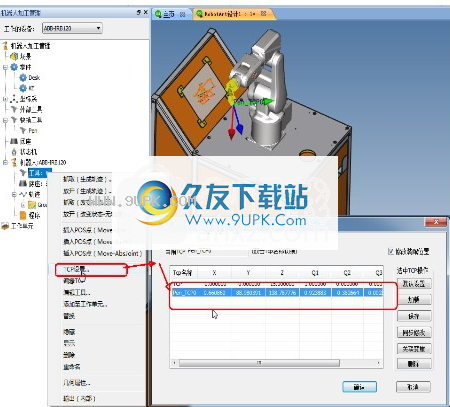
A.工具本身的TCP校准
首先,通常在进行此操作之前,机器人本身必须首先执行机械调零。
其次,必须使用四点或五点校准方法执行TCP校准。
最后,将机器人校准的TCP值(XYZABC)复制到RobotArt软件中,右键单击该工具的[TCP Settings]界面。
B.工件校准
将来,轨迹将依靠零件上的边缘或3D曲线生成轨迹。因此,至关重要的是要确保设计环境中的机器人与组件之间的空间位置关系与软件中的实际环境保持一致。
因此,一般的机器人工作站将具有用于校准的顶级工具。首先,顶部工具的尖端将由机器人使用TCP(四点或五点...校准方法)进行校准;
然后,使用该顶部工具,在实际环境中使用顶部触摸零件上的三个点,然后使用纸质记录此时机器人顶部TCP的空间坐标,通常为XYZABC;
最后,使用RobotArt软件中的[Calibration]功能,对软件中的组件进行校准,以确保其与机器人之间的空间位置关系与实际环境一致。
(3)添加曲目:
A.添加的起始点(起点)
在开始移动机器人之前,机器人通常处于近似机械零点或相对安全的位置。为了模拟现实,该点需要与轨迹点一起记录。
通常,只需选择机器人的法兰工具,然后右键单击[Move-AbsJoint]。

B.添加写作轨迹
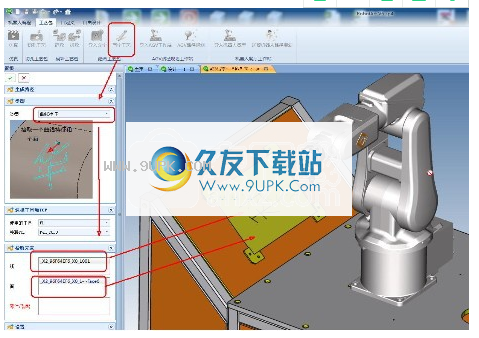
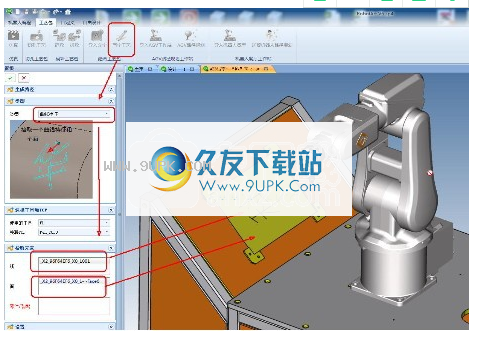
生成根据笔迹中轨迹类型“曲线特征”生成绘图轨迹
ft封装,并设置轨迹参数
功能职位:
的RobotArt离线编程软件[工艺包] / [绘画工艺包] / [书写工艺]顶部的功能面板,单击它
Robotart(离线编程仿真软件)v2018企业版
曲线特征(轨迹创建过程):
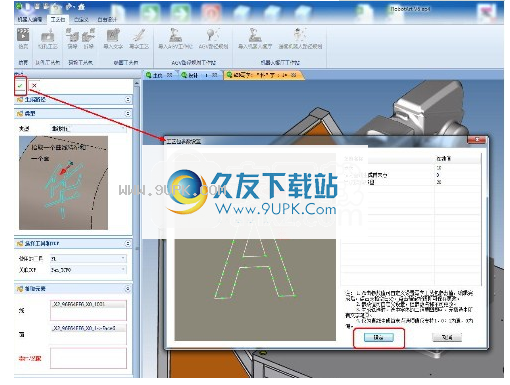
在左侧的“ Writing Craft”面板上,从“ Type”下拉菜单中选择“ Curve Features”;
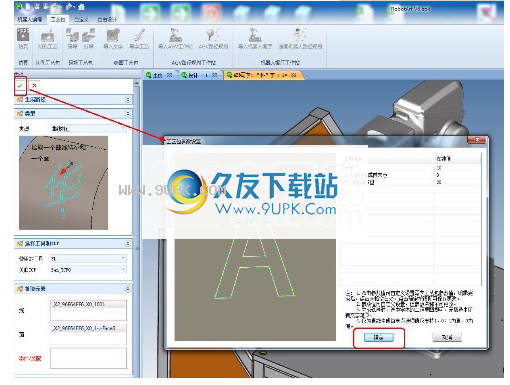
B.根据需要选择元素:(弯曲的)线条和区域;

C.然后单击面板左上角的[Tick]按钮,将弹出用于设置入口和出口点的界面。直接单击[确定]完成轨迹创建。
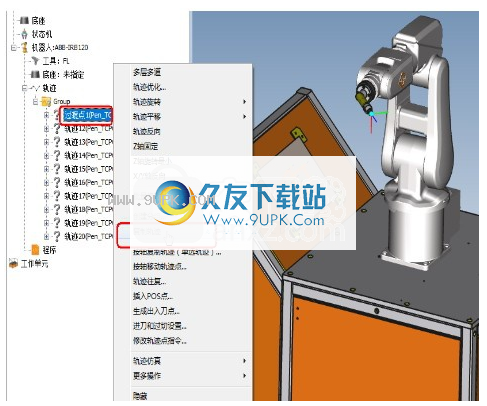
C.添加的起始点(结束点)
机器人在机器人之后,出于安全原因,机器人完成了书写(处理)轨迹,因此通常将其姿势调整为近似机械零点或更安全的位置,并且还需要记录该点。
一种方法是按照步骤“ A.原点添加(起点)”中的说明将机器人各轴的姿态调整到安全位置,然后插入pos点。
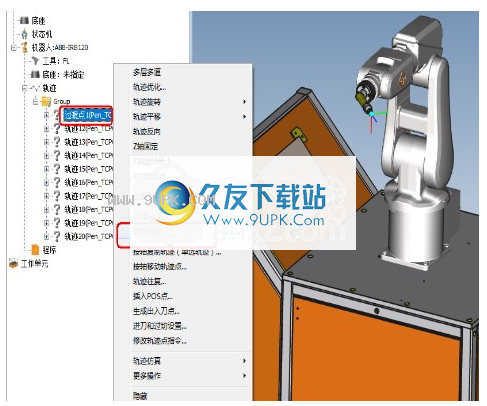
另一种简单的方法:选择轨迹的第一个位置点并单击鼠标右键;然后在右键菜单中单击[复制轨迹],以创建机器人终点位置的原点。
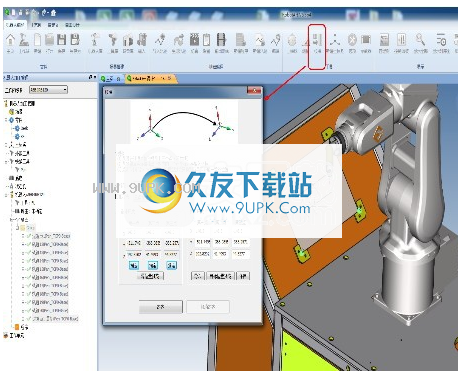
(4)仿真调试:
功能职位:
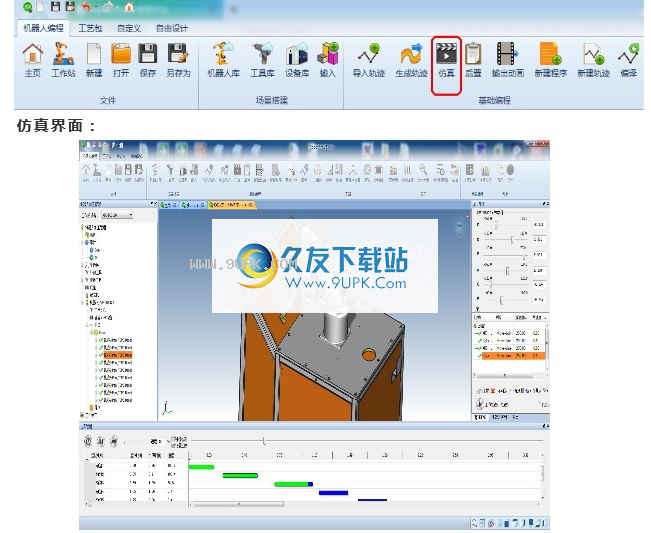
功能RobotArt离线编程软件[Robot Programming] / [Basic Programming] / [Simulation]顶部的功能面板,单击它
仿真界面:

在仿真结果的帮助下,调整轨迹,使其没有轴超限点,不可达点或奇异点。 (在此示例中,轨迹在编译后自动为法线,无需调整)
有关详细的轨迹调整和优化方法,请参阅RobotArt官方网站上“ Learn Art”下的第三本书“ RobotArt用户手册”。
(5)后代程序
单击脱机RobotArt成为软件顶部的功能面板:[机器人编程] / [基本编程] / [返回];

可以将机器人轨迹转换为ABB可以识别并在“邮政编码编辑器”界面中显示的指令格式文件(如下所示);
单击“邮政编码编辑器”界面底部的[导出]按钮,以导出并存储带有后缀“ * .mod”的ABB邮政编码文件。
(6)保存工作站
(7)输出动画
2.3机上调试和运行(这是后续操作过程的介绍,并且知识要点得到扩展,而不是五分钟之内)
上例中的机器人使用ABB的ABB-IRB120机器人。如果碰巧有这个机器人在旁边,您可以在ABB背面的RaBB.mod文件上测试运行真实计算机。
A.上传邮政编码:
有两种上传ABB代码的方式:
A.下载到ABB控制器:
当预先安装了RobotArt软件和ABB-IRB120的主机已通过网络电缆连接并设置了连接IP时,您可以在后面的界面中单击[下载],直接将后面的代码传送到ABB示教器。

B.使用USB闪存驱动器(U盘),将后RaMain.mod文件直接复制到示教器。
常规步骤是通过UBB示教器中的[程序编辑器]-[文件:加载模块]将U盘中的文件复制到ABB示教器中。

B.示教器操作:
在程序编辑器中,找到刚导入的帖子格式的文件,然后单击[显示模块]以显示邮政编码。

C.实际机器操作:
一些老的教学吊坠,打开导入的代码后,需要单击界面右上角的[例程程序],将当前程序添加到[PP Move to Routine]中,以便随后运行真实计算机:

导入将机器人的后方代码导入例程后,按“启用”按钮o
n在示教器的背面,然后单击示教器
面板上的“运行”,机器人将根据编程的程序开始工作。

软件优势:
优势RobotArt有哪些优势?
(1)实时更新RobotArt在线版本

(2)丰富的资源库
支持对诸如机器人和工具之类的资源进行分类,筛选和统计,并保持资源更新;

(3)授予大客户帐户管理权,后台控制权等。
用户可以在后台查看和修改个人基本信息,并管理负责任的大客户。

(4)我们的一站式服务是这样的:

软件功能:
1.丰富而完整的在线云资源库
该平台建立在商业云(例如阿里云)上,具有嵌入式云资源网页和非固定环境模型。

2,深开机器人编程系统
通过软件功能,打开以下类型的接口:
DH参数
几何模型
逆解算法
背面配置

3.机器人生产线工艺规划仿真系统
根据轨迹,结合机器人自身的关节速度极限和负载的重心,获得时序图和利用率。

4.用于机器人生产线的高性能3D平台
零件以B-Rep表示,以确保加工精度;其他模型用三角形表示,以提高性能;渲染引擎使用插件设计。

5.复杂轨迹离线编程系统
运动主体:机器人。
数据核心:轨迹。
生成根据零件的点,线和面信息生成轨迹。
记录所属机器人的逆解结果,速度,IO事件等记录在轨迹点上,并可以进行参数修改。

6.大规模行业应用案例
激光切割
去毛刺
打磨
喷漆
穿孔
上货和下货
部件
数控加工
安装方法:
1.有需要的用户可以单击本网站上提供的下载路径下载相应的程序安装包
2,解压安装包后,可以得到相应的安装数据包,双击主程序进行安装,然后单击自定义安装

3.用户可以单击浏览按钮根据需要更改应用程序的安装路径

4,等待应用程序安装进度栏加载,需要等待一段时间

5.根据提示单击“安装”。程序安装完成界面会弹出,您可以单击“完成”按钮(不要先运行软件)


 onekey一键还原 8.2.4最新版
onekey一键还原 8.2.4最新版 猎豹免费WiFi 5.1.16041115官方正式版
猎豹免费WiFi 5.1.16041115官方正式版 160wifi无线路由软件 4.2.0.4最新版
160wifi无线路由软件 4.2.0.4最新版 pp助手 5.2.0.2798最新正式版
pp助手 5.2.0.2798最新正式版 百度输入法win10版
百度输入法win10版![桌面百度软件[百度桌面搜索工具] V3.0.0.2781 免费版](http://pic.9upk.com/soft/softico/2016-3/20163249251986748.jpg) 桌面百度软件[百度桌面搜索工具] V3.0.0.2781 免费版
桌面百度软件[百度桌面搜索工具] V3.0.0.2781 免费版![WPS Office 2016无广告版[WPS2016官方版] 10.1.0.5975 免安装版](http://pic.9upk.com/soft/softico/2016-5/20165279362197118.png) WPS Office 2016无广告版[WPS2016官方版] 10.1.0.5975 免安装版
WPS Office 2016无广告版[WPS2016官方版] 10.1.0.5975 免安装版 万能五笔输入法
万能五笔输入法 网易云音乐电脑版
网易云音乐电脑版 小皮助手 3.7.5.27官方版
小皮助手 3.7.5.27官方版 驱动精灵
驱动精灵![QQ浏览器 9.3.6582正式免安装版[双核浏览模式]](http://pic.9upk.com/soft/softico/2016-5/20165279391078287.png) QQ浏览器 9.3.6582正式免安装版[双核浏览模式]
QQ浏览器 9.3.6582正式免安装版[双核浏览模式]![PZ-ISP 1.60免安装版[单片机烧录器]](http://pic.9upk.com/soft/UploadPic/2013-9/201391261875637.gif) PZ-ISP 是一款让您爱不释手的工具软件,串口调试+常用MCU设备ISP上载软件,使用完全免费!本软件可以在Win95/98、Win2000、WinNT、WinXP、Vista下面运行。
软件功能主要为:
1、接收从串口进来的数据并在窗口显示
2、...
PZ-ISP 是一款让您爱不释手的工具软件,串口调试+常用MCU设备ISP上载软件,使用完全免费!本软件可以在Win95/98、Win2000、WinNT、WinXP、Vista下面运行。
软件功能主要为:
1、接收从串口进来的数据并在窗口显示
2、...  龙博源代码编辑器一款中国程序员自己的代码编辑器,可编辑处理文本、html和程序语言的32位编辑器,通过设置用户工具,可将其作为c、java、php等等语言的一个简单的ide
功能特色:
1、多种语法高亮度显示: C, C++ , ...
龙博源代码编辑器一款中国程序员自己的代码编辑器,可编辑处理文本、html和程序语言的32位编辑器,通过设置用户工具,可将其作为c、java、php等等语言的一个简单的ide
功能特色:
1、多种语法高亮度显示: C, C++ , ... ![Cppcheck 1.6.2 Rev 2正式版[C/C++ 代码分析程序]](http://pic.9upk.com/soft/UploadPic/2013-9/20139165564097882.gif) cppcheck是静态的C/C++ 代码分析工具兼xml文件怎么打开工具,用以检查内存泄漏,错配的内存分配和释放,缓冲区溢出,以及更多的问题。
cppcheck是静态的C/C++ 代码分析工具兼xml文件怎么打开工具,用以检查内存泄漏,错配的内存分配和释放,缓冲区溢出,以及更多的问题。 ![EText中文编程 1.1.5中文免安装版[中文代码编辑器]](http://pic.9upk.com/soft/UploadPic/2013-9/201392612505928680.gif) etext中文编程是一款中文代码编辑器,支持中文编写php、html、css,支持多种编程语言的语法高亮、拥有优秀的代码自动完成功能。
etext中文编程是一款中文代码编辑器,支持中文编写php、html、css,支持多种编程语言的语法高亮、拥有优秀的代码自动完成功能。  suner验证系统一款支持各种语言调用,但必须是标准DLL调用!
suner验证系统一款支持各种语言调用,但必须是标准DLL调用!  QQ2017
QQ2017 微信电脑版
微信电脑版 阿里旺旺
阿里旺旺 搜狗拼音
搜狗拼音 百度拼音
百度拼音 极品五笔
极品五笔 百度杀毒
百度杀毒 360杀毒
360杀毒 360安全卫士
360安全卫士 谷歌浏览器
谷歌浏览器 360浏览器
360浏览器 搜狗浏览器
搜狗浏览器 迅雷9
迅雷9 IDM下载器
IDM下载器 维棠flv
维棠flv 微软运行库
微软运行库 Winrar压缩
Winrar压缩 驱动精灵
驱动精灵